
If You Use Google Maps, You Should Be Using Saved Places Lists
Even if you've never heard of Google Maps saved places before, you can probably guess what it is.
It's a way to save and manage lists of locations on Google Maps, view them right on the app, and share them with others.
Simple.
Too simple?
Maybe, because barely anyone uses saved places to its full potential. But they should. Anyone who uses Google Maps should use saved places. Heavily.
This guide will get you started.
In This Saved Places Guide
Why Use Google Maps Saved Places
There's Too Much to Remember
Not even the guy who memorized pi to the 70-thousandth decimal place can keep track of all the places to see, restaurants to eat at, addresses to go to, and the perfect selfie spot recommendations we're overwhelmed with daily.
But our phones can with just a couple of clicks.
You Probably Use Google Maps Already
Unless you're one of those people who's paranoid that Google's spying on you, you're probably using Google Maps as your go-to navigation app already.
And you should be. It's the most comprehensive and accurate map app out there (…unless you're hiking. In that case, use Maps.Me).
So the Saved Places functionality makes what you're already using even more useful.
You Can Access Saved Places on Any Device
Changes you make on saved places automatically and instantaneously synchronize across any phone, tablet, or computer that's logged into your Google account.
It Even Works Offline
Saved places are visible on Google Maps even when you're offline or in airplane mode. Offline info includes the opening hours, phone number, exact address, and average review score.
Just make sure to save your Google Map for offline use.
And make sure to charge your phone or bring a charger or battery back, before heading out.

It Replaces Tourist Maps
In the good old days (i.e., only a few years ago), my first stop anywhere I traveled was the tourist information office.
There, I'd talk to an employee who'd circle, star, and scrawl all sorts of recommendations on a free paper map. I'd then circle more spots I'd read about in guidebooks and whatnot.
These were my trip treasure maps.
But I don't use them anymore. Google Maps' saved places has replaced them as a more durable, detailed, and accurate digital alternative.

It Makes Deciding Where to Go Easier
When it's time to plan my monthly "date night" with Kim, I simply pull up my "Want to Go" saved places lists.
Those lists are where I save all potential date night spots – restaurants, bars, activities – that people recommend to me or that I read about.
I pick a couple close to each other and, just like that, date night's planned.
It's Great for Planning Travel Itineraries
When Kim and I had a 24-hour layover in Taipei, we collected restaurant, food, and attraction tips from everywhere and dumped them all onto our saved places list.
This is what we ended up with:
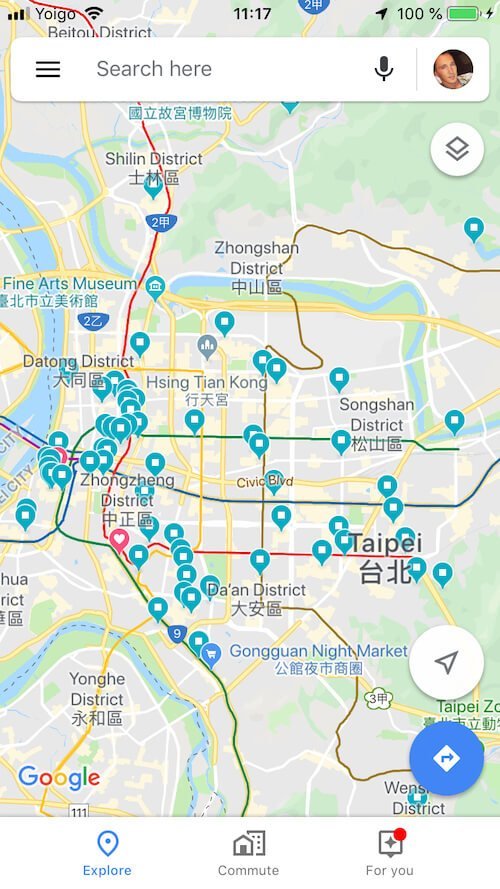
Like pieces of a puzzle, we put together a route that would allow us to get to as many of them as possible in one day.
The result?
We went to A LOT of places in Taipei, eating 24 different foods in 24 hours.

How to Get Started With Saved Places
Follow these screenshots and their captions to learn the basics of how to create a Google Maps saved places list, save locations to those lists, and share them with friends.
If something's unclear, check Google's official instructions or ask me in the comments.
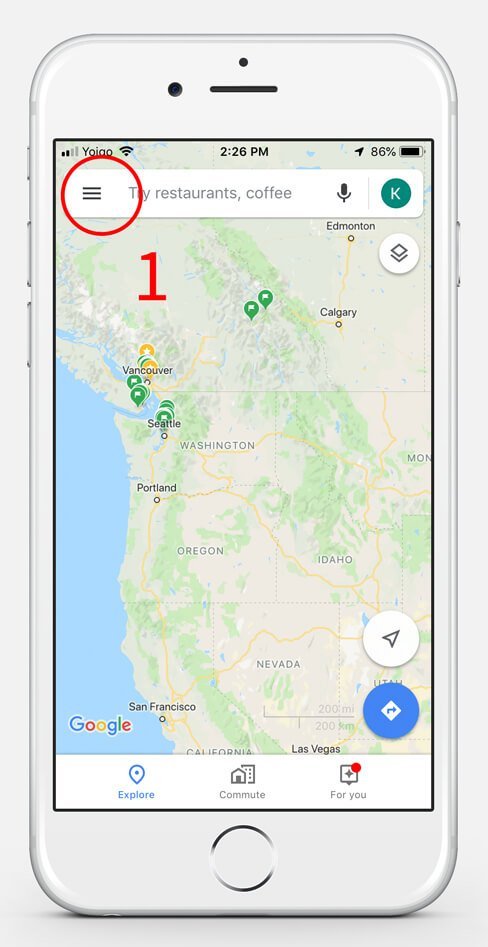
How to Create a List


*. [NEW!] Choose emoji icon.
6. List description (optional).
7. Save.
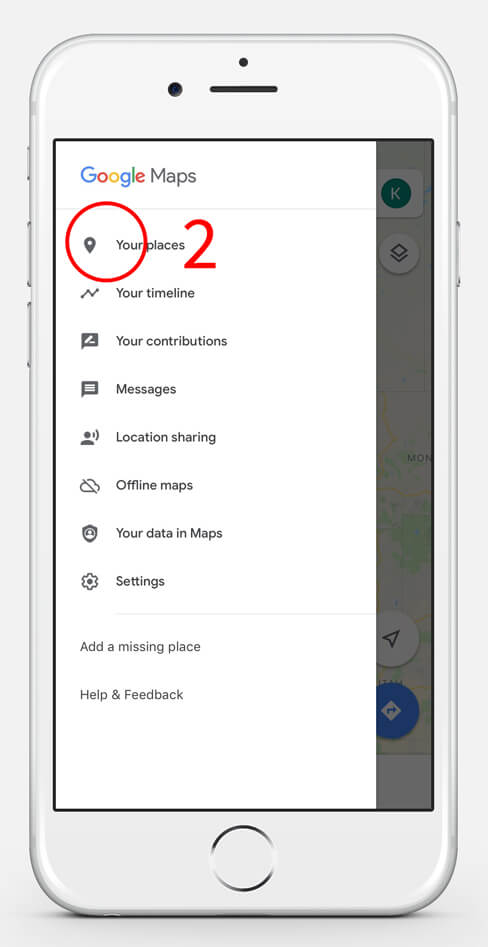


4. "+"
How to Save a Location to a List

2. Tap "Save."


What if the Location's Not on Google Maps?
Tap and hold to drop a pin anywhere. You can then add a label (if you wish), add it to a saved places list, and add a note to remind you why you saved it.
Quick Video Walkthrough:
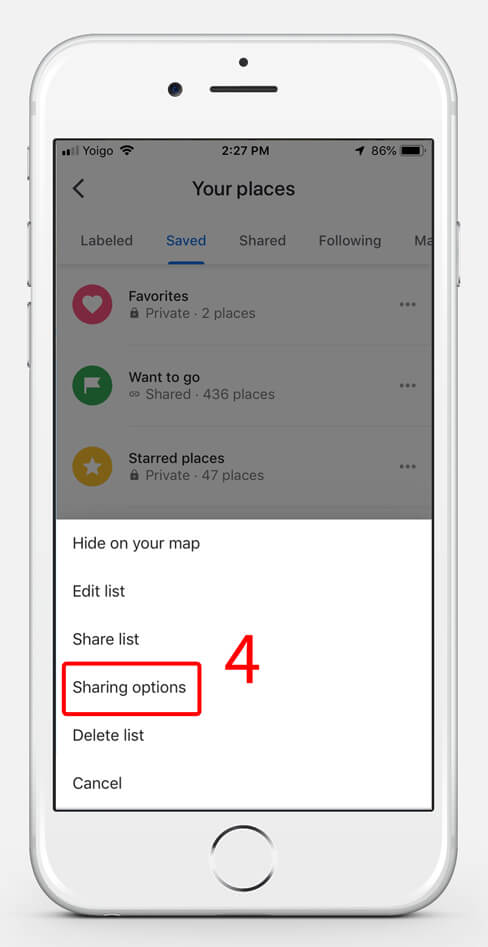
How to Share a List of Saved Places




Manage Your Saved Places Most Easily on Your "Collections" Page
Go to www.google.com/save/. As you will see, this page makes it easier to manage your saved places lists, which I presume Google wants us to call "collections":
- Bulk delete or move places.
- Rearrange the order.
- Quickly edit notes for each location.
[Thanks to Brandon for sharing this in the comments!]
How to Get the Most out of Saved Places
Save Places Indiscriminately
When in doubt, save it.
Whether it be a recommendation from a friend, an interesting location on an Instagram post, a spot you pass by while walking around, or whatever, any time you see, hear, read, (or smell, taste, or feel) a place worth remembering or returning to, save it to a list.
Adding a place to a list doesn't mean you have to visit or you ever will. It's a reminder to your future self to keep it in mind.
Because you never know.

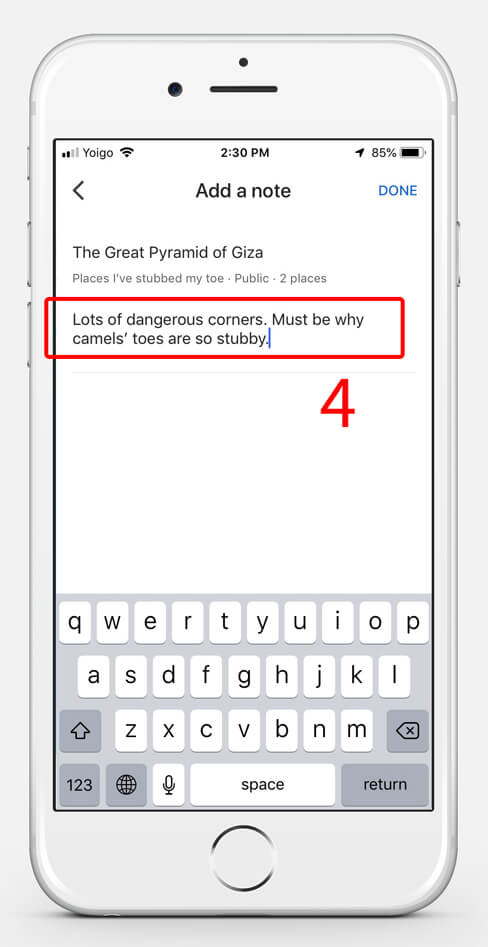
Always Add a Note
When you add an item to a list, add a note to remind your future self:
- Why did you add the item to the list?
- Who did you get the recommendation from?
- Is there any feature (like a dish at a restaurant) of that location to remember?
Without a note, your future self will have a map full of locations and no idea why your past self added them.
(Refer to Step 4 of How to Save a Location to a List above on how to add a note.)
Make Lots of Lists
Making lots of lists is the key to avoid getting lost in a constellation of saved places on your Google Maps.
Here in Valencia, where Kim and I are living for three months, I've created separate lists for dinner restaurants, lunch restaurants, tapa bars, attractions, shared bike parking spots, and outdoor workout areas.
And I made two lists for each category: one list for want to go, e.g., "VLC tapa bars want to go" and one list for where I've been, e.g., "VLC tapa bars been," so I can keep track.
Having lots of lists like this also makes it easier to share with others.
Use a Good Naming Convention
Picking a convention for naming your lists and sticking to it makes it easier to keep track of your ever-expanding list of lists.
For example, I name all my lists the following way:
[city short name] + [category] + [want to go / been]
For example, "Valencia restaurants want to go" or "Vancouver hikes been."


Hide Lists When Not Using Them
You can select an emoji icon for each list to distinguish one from another. This is a welcome and long-overdue addition to Google Maps. The emojis only seem to appear on mobile for now; on desktop they remain the default turquoise icon. Either way, if you start having lots of lists in a city, it can help to hide some you don't need to always see.
To toggle a list's visibility on Google Maps, click the "…" beside any of your lists and select "Show on your map" or "Hide on your map."
Be Careful With How You Use the Default Lists
Use Google Maps' three default lists – Favorites, Want to go, and Starred places – carefully.
The advantage of these lists is their symbols are visually distinguishable from the turquoise circles of every other list.
The disadvantages are they can get quickly out of hand when you use them too much. You can't share Starred places, either (but you can the other two).
I only use Starred places for temporary reminders (like a place I'm meeting a friend later in the week), Favorites for the best places that I want to remember to recommend on this blog, and Want to go for… nothing anymore because I prefer to have Want to go lists for each category.
Use Labels and Lists Together to Remember Your Friends' Houses
To save the locations of my friends' houses, I:
- Input their home address.
- Tap the "Label" button at the bottom.
- Label it as "Geraldine's house" or whatever.
- From then on, if I search "Geraldine's" on Google Maps, it will pop up.
- Tap the "Save" button at the bottom, just next to the "Label" button I previously pressed.
- Add it to my "Friends' Places" saved places list.
- In the notes, add anything like buzzer number, unit number, or parking stall.
Issues With Saved Places
Saved places lists are a game-changer compared to paper maps we all relied on not too long ago. But that doesn't stop us from complaining about it. It's like a Google engineer complaining that the pistachios aren't shelled at the free gourmet lunch spreads at their office.
Here are some functionality issues we've come across and that fellow readers have pointed out in the comments. Pistachio-loving Google engineers take note:
It Sucks on Desktop
Google Maps' desktop functionality of Google Saved Places is glitchy and doesn't sync well with your phone. I recommend you stick to using it on mobile.
Or go to the Google Collections page to manage your saved places there.
Missing From Route Planning
When planning a route using Google Maps' directions functionality, you can't access your list of saved places to choose from there. You have to remember or note down separately the saved places you want to add to your route.
Sharing Bugs
Quite a few readers report that when they share saved lists with friends their friends don't see all the locations. I suspect this is related to issues syncing between desktop and mobile. By using Saved never come across the issue.
Can't Easily Toggle From "Want to Go" and "Visited"
We'd like to be able to classify saved places on our lists as "Want to Go" and "Visited" then filter accordingly. For now, we have to maintain separate lists and move locations from one to the other. Annoyingly, Google Maps deletes notes associated with any location you remove from a list, so we have to copy-paste it into the new one to keep it.
No Sorting Or Filtering
It'd be helpful to be able to sort lists alphabetically or by date, for example.
Frequently Asked Questions About Google Saved Places
Can I collaborate with a friend on a list?
Yes!
After step 6 of How to Create a List, select "Group" below the name and description of the list. You can then invite others to join this group and contribute.
Note a significant downside of groups: You cannot add comments below each saved place.
Can I export/import lists of saved places?
Yes:
- Go to Google Takeout and log into your account.
- Deselect all except for Maps (your places) and download.
- Upload the file onto ExportGoogleMaps.com to get it in an easy-to-use spreadsheet format.
(Thanks to Jordy for leaving this tip in the comments!)
Another question about Google Maps Saved Places?
Ask me in the comments. I can't guarantee to have the solution you're hoping for, but I'll do my best.


Thanks for this great post! I have just recently learned about the amazing functionality of Saved Places and I use it all the time now in my travels. It is definitely the best way to keep track of everything I read and hear about when visiting a new place. I think I will now need to adopt your strategy of making multiple lists and using a naming convention so I can keep things a little more organized. Thanks for the tips!
Thanks to you Amy. From the looks of your blog, you're going to have a lot of time to play around with and master Saved Places, so if you come up with some tricks or tips we didn't mention please let us know! Happy travels.
the tips are apparently out of date as are the google instructions. My iphone has a bar at the bottom with saved places, not any of the screenshots you show. took me a while to find it.
Hi Duane. You're right. The diagrams in this post need an update. Glad you found what you were looking for nontheless.
I have noticed a new update which makes it kinda difficult to delete saved places. I use to be able to just click the same “saved” button after I have selected the pin I want to delete. Something has recently changed and the only way I have figured out how to delete is to go to the entire list and then search through to find the pin I want to delete. There is an option to delete once you picked your pin from the list. Any advice on an easier solution?
Hi Elliott. When you tap a saved location on a map to pull up its info card, there should be a button there that's colored and says, Saved, no? To the right of Directions, Start, etc. You may have to swipe the buttons to the left to see the Saved button. Is it not there for you on your device?
Using all of this already, but cannot find how to plan like a walk/tour connecting the places you saved.
Would be nice navigating like this, following the walk created based on your spots. Right?
Hey Andy. I imagine you already know you can have up to 10 destinations in a route on Google Maps, right? So you mean somehow Google would automatically optimize the fastest route between all the places you want to visit? Yeah that'd be handy from time to time.
I recently added 71 locations to my places but I can only view 30 on the list. I believe they All show up on the map, but why am I being restricted?
I saved 20 places on a list I created, however when I shared it with a couple of friends only 10 places showed up?
Hey Heather and Darren. I'm sorry to hear about your issues. Do you have the same problem on both mobile and desktop? My experience is that Google Maps can be glitchy synching between the two.
Hello Guys, I have the same problem. I have a list with 300 places that I've shared with a friend and she could only see 10…. Did you solve it ? Thanks
Hey Christian. I haven't been able to reproduce the problem. If you don't mine, maybe share it with me so I can see what's going on and do whatever I can (likely very little) to help troubleshoot? Share it to theunconventionalroute @ gmail.com.
Great article but how do you FIND lists that other people have created (and have chosen to share it publicly)? Is there a way to search for them in Google Maps or is there a function somewhere within Maps where you can browse through lists?
Travis
As far as I know, there's no way, but that'd be an interesting functionality. A new type of social media. I wouldn't be surprised if Google Trips somehow incorporates the maps eventually. Sorry for not having an answer for you Travis, but thanks for sharing the idea.
After you've created a list (on your mobile), scroll all the way to the very bottom. Give it a couple of seconds and a section will come up called "Explore more lists". It will show you about five lists of other people you can view, or you can tap on "See more" to bring up a bunch more. Apparently, these lists are generated based on the locations of your list. In other words, these lists are suggestions related to the places you've already saved.
Thanks for this article!
I'm a food and travel blogger and I've been using this feature more to share in my articles for people to have handy. Two things I would like to know for sure are:
1) does the list/guide list places in order you add them?
2) how does google choose the featured photo? is it based on the first entry, or is it at random it seems?
I'm a vegan food blogger and sometimes my lists will populate a featured image of something that's not very vegan-friendly from a restaurant in the list, thus my lists are less appetizing to my readers lol.
Hoping I can hack this process a bit more if possible.
Thanks for any insight!
Hey Darby. Good questions. I haven't been able to hack the shared list cover image. My only idea would be to figure out which place the offending photo is from, remove it so your list updates its image, then re-add that location. And for the order of the places, it seems random and out of our control. Nice work with your blog! Saving it for when we head down to Seattle next.
Hi Dave, I saw "Explore more lists" in one of my lists that I named Spain for a trip we are going on. I have another two lists Portugal and France other places we are going and there isn't an "Explore more lists" section at the bottom. Not much published about this. Is there something I need to do to get it to show in the two lists that it is not showing? Thanks, Larry
Same. It's n hit miss for me . Sometimes I see the explorer more lists.. sometimes I don't
@fucckyea is my insta
DM me.. let's trade lists
I'm looking for a way to add a stop to my route and choose the location from my saved places. Currently when you choose to add stop you have to run a general search and there is no way to look at saved places from there. Do you know a way to do this or is it actually possible that no one at Google has thought about needing this option?
Thanks!
Unfortunately not, Steve. As far as I know, at least. I agree that'd be a useful function. But until Google finds ways to make more money off of us using Google Maps I doubt they'll make this and other improvements.
Well I don't see this functionality as "useful".
As far as I am concerned, it is CRUCIAL!!
It is the only thing I have ever wanted to do with Saved lists.
For a while there, every so often, a great new feature would just
show up, as if the devs were reading my mind.
So every time I want to add a destination from a saved list,
I look around to see if it has showed up – but no joy.
I am really dumbfounded as to why the need for this feature is not
COMPLETELY OBVIOUS!!
Have you any idea how to lobby Google for this feature?
Could have been a really great stuff if the guys at google made a few lines of additional code instead of counting money all day… :/
Eg. fixing the bug with sharing. Adding possibility to customize the icon. Adding the switch to a more accessible place. And million other stuff.
Hey Tamas, if I had so much money to count I'd probably do the same, haha. I'm with you, though. I bet eventually they'll find a way to monetize Google Maps more and will start making improvements to suck us in, for better and for worse.
okay this is all great but I cannot figure out how to get directions using my saved places, I can't pick them form the map or really use them in anyway.
They are just there looking at me but I can't select them for any directions.
Hey Ray, That's not normal. You should be able to tap any of the blue icons on your map to pull up all the info on that saved place and get directions to it. I haven't had that problem before, so I'm sorry that I can't help you there other than suggest you restart your Google Maps or phone.
Saved Places have made my daily life and travel so much better for all the reasons you lay out. Thanks for additional tips!
However, I used to be able to mark places in the default "Want to go" list as "visited." But I can't figure out how I did that in the past and if that is still available. Do you know? Thanks again!
Hey Becca, Nice to hear from a fellow Saved Places-er. As a workaround, I use two separate lists for this: Cape Town restaurants WTG and Cape Town restaurants visited, for example. I'm hoping Google will add this functionality at some point. They're making lots of improvements these days, so there's hope. Meanwhile, please let me know if you find a better method.
For places to show up as Visited you need to have your Location History turned on – provided your phone can get a fix off wifi or triangulate you from a cell tower it will know your location or if you have a newer phone where the GPS doesn't eat away at your battery then turn it on and for sure it will know you have visited a place
It seems you can't share "starred" places, as far as I can work out….
Yeah, you're right. Thanks for pointing that out, Erin. Weird that you can't share Starred places but you can Favorites and Want to Go. I updated the post to mention this.
it still isnt't possible to sort a list alphabetically or by date, which is so so so so ridicolous. with more than 200 places in my want to go list this is a dealbreaker, it just ruins all the "fun". the most basic feature is not there, it's the worst serviced app by google imo. and you could not export the list like bookmarks and import them in a different account. it is NOT such a great application to be honest.
Totally, Phil. There's so much room for improvement, especially simple things like you mention, that it's frustrating Google doesn't step up and do it. On the other hand, the existing functionality (especially when you understand the limitations) is helpful—definitely more helpful than not having any saved location functionality at all.
What you have to ask yourself is…did I have to pay for this? Answer no you didn't and that's why you don't get all the functionality you want, Google have come up with some pretty amazing products for us over the years and if you think about it when you sign up for a free GMail account you also get Maps, Translate, Docs, Sheets, Slides, Drive (including 15Gb storage) and everything else. I'd say that's pretty amazing for a freebie – the only down side is of course we don't get exactly what we want. I've used My Maps and Saved Places for years now and I totally agree about custom icons, that's really my only bugbear (that and the layer limits in My Maps).
Why do you want to sort by date – which date? The date you saved it to the list? Because that's the only date you could get – if however you want the date you visited, then as long as your GPS is on and you have said yes to Location History – it will show up in Timeline (it will even bring up reminders of where you were on a certain day five years earlier!). You can get your saved lists out of Google using Google takeout but it comes as a .json file which you then need to convert to get it into a .csv file and then you can open it in Google Sheets or whatever – this gives you the date and time you saved it, any label you created or a name and a web link directly to the place.
Do you know if there's a way to have a list of Saved Places show on the same map as directions. IE I have every winery in NJ plotted in a Saved Places List. When I plug in a destination and get directions, I'd like to see all those wineries to find if any are near my route. To date, I've just put 2 maps (directions from NYC to DC and Wineries in NJ List) side by side and did a visual comparison, but it would be great if they were actually on the same map.
Sorry Chris, but I don't know of any better alternative to the approach you're using.
How does one add a saved place to an already existing route in google maps? Once the route is created, the list of saves places is no longer available.
Sorry Osborne but, as mentioned in the previous comment, it's not currently possible.
Your Starred places should still be visible-best way is to open up the app > go to your saved places and then back to map view >give it a little time to draw the lists and then you can zoom in and click directly on the symbol for a place and then the menu will come up which will allow you to get directions – then all you need to do is use the double arrow icon to make this the destination and then you're good to go. If you want to use a saved place as the start point > click in the box > Choose on map and then you will have to zoom right in to put the pin on the right place and you're good to go.
I find the easiest way to do it is plan it on the web version and then send the directions to my phone – far easier to click on a saved place with a mouse than fiddling with your phone
Is there a way to change the icon of my lists?
Not at this time.
So… I'm feeling a bit frustrated with some pretty serious lack of functionality both with My Maps and Saved Places. I recently learned/taught myself how to make My Maps for an upcoming trip to Iceland. I meticulously made layers for each place to go, gave them custom labels, and added notes. I made a custom map for the whole trip, and then started making ones for each day, complete with a directions layer – only to find out that when I load the custom map on my phone, I can't access that directions layer. What the heck? Why on earth would I not be able to get the directions? So then I looked at your post about Saved Places – I created a list called Iceland Day One and added all the places from the Directions Layer from my custom map… and then there is *STILL* no way to make Google Maps create directions using all the points in the list. Is there ANY way via google maps to make a list of places and then create directions using that list? Or do I have to go into google maps each day and "add stop" for each attraction, which kind of makes me feel like making custom maps and saved locations is a waste of time? Thanks!
I'm sorry to hear about your frustrations, Abigail. As you've found out the hard way, Google Maps is useless for saving complex directions. For pre-planned itineraries, I'd suggest making them off Google Maps entirely then looking up the directions between each one at a time as you visit them. Saved Places doesn't help you much for this, as you point out. Where it comes in handy is the step beforehand to visualize and decide on what places to see and in what order. Plus, if someone tells you of a new place when you're on the road, you can add it and see how close it might be to other places you've already planned to visit. Happy travels!
I've had the exact same experience planning my trip to Iceland! Try the maps.me app! You can plot your destinations by color and include notes. Plus it has offline capabilities.
Chris… something has changed in google maps so that when you have made your saved lists, then highlight a new location and hit "save" the only options that come up are starred, favorites, or want to go. It no longer will display my saved lists. (as you have in your screenshot How to Save a Location to a List step 3.) It always used to look like that and I used it for a number of trips, now the saved lists are no longer coming up when I hit the save button, even though I can find them from the main google screen. I have posted to the user forum and have some upticks of others now experiencing the same problem. Ideas?
Hi Dave. Could it be that you're logged out of your Google account? Try logging out and logging in and see if that helps.
Hi Chris,
I just had the same problem as Dave. Happened yesterday. Was fine the day before. Tried switching between accounts, but no luck. Still fine on devices, just not the computer.
Hi Don. Yep, I'm having the same problem, now. That's it for me using saved places on desktop. It's too glitchy. Only mobile from now on.
Same thing has happened to me too. Really annoying!
In your screenshots I only see your icons and not the default google map icons (for museums, points of interest, etc). How do you turn those off? It's hard to find the places I've saved on the map because I'm also seeing blue markers for other places.
Hi Lisa. As far as I know, there's no way to turn off those other markers. They're not visible on our screenshots because we're zoomed out enough so they don't appear.
If anyone finds a way of doing this I’d love to hear it.
Use a different base map such as Light Political.
I don’t see “Saved” section under “Your Places”.
I see Lists, Labeled, Reservations, Following, and Maps.
What is the difference between Lists and Maps? I am curious to see what Google intended for this functionality – seems redundant to me.
I can’t even update / add places on Maps using the apps. I have to do this on Google map website.
It’s as if two different groups of Google project teams are working to add similar functions.
Yeah, it looks like Google Maps has changed the menu names. We'll have to update our screenshots. "Saved" is now "Lists." Thanks for pointing that out.
The Maps menu is for Google My Maps and the Lists is for saved places. Our Google Maps tricks post has our take on the difference between the two and why we stick to Saved Places mostly.
Hello. I’ve made a list of cities in Italy for a possible trip. Now I can’t see the name of the city on a map unless I tap on it, just the blue pin. Is there a way for the city name to display for saved cities on a map?
Hi Marc. Not that I know of. If you zoom in enough you should see the city names without having to tap.
Hi, any updates on how to make the missing starred places reappear? I have thousands of places saved, now tediously went through and re-saved a lot of saved stars into separate lists, but the missing places have not reappeared , I am well below the 500 number Limit now. Most of my Iceland saved areas are still missing.. really frustrating!! Please help
Hi Julie, Your starred places have disappeared? On both your phone and computer? I haven't heard of that issue, so don't have any ideas how to help. I'm sorry to hear about it.
I have the same issue with disappearing Starred Places as Julie has. It seems indeed the SP –unlike the Favorite Places and the WantToGo Places– is limited to 500 locations. It may not happen immediately, but once you go over that limit, after some time GMaps will start to delete your oldest SP's first, until you end up with exactly 500 SPs again, i.e. the SP's exist on an ongoing roll-over basis of 500 items. Yet another ridiculous featurebug Google doesn't seem willing to fix.
Thanks Walter W-E for the helpful info. I've updated to post to warn others of this.
Goggle Map doesn't delete your starred places, but it shows the most recent 500 starred places only.
Try to change your starred places to a personal list. Once it gets below 500 older starred places will reappear.
I have saved lists and places. All of them have notes. I know some users search their places with the note, but it doesn't works for me. I have to either look on my lists or choose on map. I use Android.
When I open a list of saved places, the map immediately zooms in on 0.0N 0.0E, ie where the prime meridian crosses the Equator. Does this always happen? Is it something I have done? Can it be forced just focus on the area of the saved locations?
I should have added, this is on Windows 10 desktop using Firefox, latest version of both.
Hi Frank. Does this happen with all your lists or just one? On desktop only, or on mobile, too? I haven't had that experience. For me, it zooms to fit all the places I've saved onto the screen. I suppose if your list has places all over the world, it might make sense to focus on 0N 0E, but I imagine that's not the case for you.
Do you have tips on maps with assistant/voice for us drivers please? E.g.. zoom in/out 1 step rather than all the way and can you get maps to take you to labelled/saved places by voice?
Good question, PaulB. I rarely drive and when I do have Kim as my navigator, so I don't have experience with this. Google Maps' instructions and overview of voice commands using Google Assistant are here. It doesn't look like you can pick a saved place to navigate by voice. You can say commands like "Recenter” and "What’s my next turn?" or “Next step.”
You can also add this tool for adding more than 10 destinations / google maps stops: https://www.morethan10.com/
i used this for my roadtrip.
Cool! Thanks, James. I've added this tip to our post on Google Maps tips and tricks.
I love saved places “Want to go” but I have a problem with deleting items. I delete them but they all reappear. I don’t know how to sync between my android phone and my IPad. I tried deleting the app on my iPad, edited the list on my android phone, then reinstalled google maps on my iPad, but all the items reappeared again on both devices. Tried editing map history but that didn’t help.
Hey Annabel. Sorry to hear you're having those issues. Are you experiencing this with "Want to go" labels specifically, or all of your saved places list? If it's only "Want to go," you could try using other lists.
On mine I have two issues; one, when I search for a labeled place it won't appear unless I search for it on my lists or on the map itself. Two, I can only save 300 per list and it deletes saved places, not oldest, but at a random.
There's more to mention but I believe those are most important. The timeline is never precise and doesn't save the places I've been to. The voice indicator it's really annoying, can't pronounce exits correctly & its even worse in Spanish. The speed indicator should be less sensitive. Rate and review notifications are of the same places and the know this place survey is really annoying too. There should be more personalization options for the user. Traffic lines should be a little bit wider. Daily commute route to work and home don't always choose the right path and leads somewhere else.
I'm a daily maps user and if you've taken the time to read this and can make an effort to try and fix some of it I'd be very thankful.
I'd love for you to add to maps a set your own route to places, literally choose the road you want to use, not just the "quickest suggested route", I want to be able to change it, make short cuts and add them for future use.
I made a collection of saved places on my computer, others on my phone. How do I get them to merge? I thought they would do it automatically, but they haven't. Signed into same google account both places
Hi Claire. Sorry to hear your saved places aren't syncing. I don't know the answer, so I quickly looked around and this Google Maps help thread has the best (i.e. least useless) answer I could find. Or maybe you could try uninstalling and reinstalling on your phone. That's all I can think of and find for now. All the best with sorting it out. If you do, please share so we can pass it on to others with similar problems.
Greetings,
I need help with Google maps. After I drive all day, I want to find a list of my places. I can see the map and sometimes there are brown square boxes where I have stopped. Sometimes however I stop in route and there is no brown box. By accident one day I hit something and a list of the places I had been on that day appeared. But I don't know how I did it. Please tell me.
Greetings Dianne. I believe you're referring to your Google Maps Timeline. That's a separate functionality from saved places lists. Here are Google's instructions for seeing them.
I apologise if this has already been mentioned, but there so many responses and I'm busy. Do you know why some of my contacts show up in "labeled" and others don't, even when I've saved addresses across all accounts? It's easy enough to ask g assistant to navigate to contact name, but I rely heavily on lists as you've mentioned, and it's helpful to see certain addresses in relation to venues.
Hi Samantha. Labels and lists are two different things. Only labels are searchable, as far as I know. If that doesn't help, I apologize for not understanding your hasty comment!
Hi Chris, great article. I've been using "saved places" for a while, but I am negatively surprised by the fact that they have not yet added the possibility to change color and logo to the icons!
Instead I have a question about viewing saved places: when I search for a city, on the map I see the pins of the places I saved, but I can't see the list of all them (about that city).
if I go to saved places, I can see "favourites" or "starred places" lists showing all the places all over the world, while it is obvious that it would be right to see them based on the city you are looking.
Is there a way to do that or another app that can read Google Saved Places and show them in a best way?
*in a better way
Hi Alex. Thanks for the comment. No there isn't a way to filter your lists by city. I recommend creating separate saved places lists by city/category for that reason. Like you said, it's frustrating that they're all one color, but I prefer multiple saved places lists to the alternative of having global lists.
Hi Chris, is there anyway I can set up Google maps to notify me when I'm say within 20km radius of any of my saved places? Knowing me, I'd forget to check maps prior to arrival in some cities, thus receiving proximity notification would be a treat. Thanks!
Hi Joshua. Sounds like you must travel a lot (or did…) to go to so many cities you forget to check maps. I'm not aware of this functionality in Google Maps, but other apps, like Apple Reminders offer these so-called "location-based reminders." It's a bit of a roundabout solution, but maybe you could set a reminder on those other apps to remind you to check your saved places?
How do you move a place from your Want to go list on Google maps, to a list you created yourself?
Hi Clair. Click the place in question so the location info comes up, click the circular icon that says Saved, then check and uncheck the list(s) you want the location to be saved under.
Hi Chris, thanks for the info. Just wanted to check. I have created lists by city but didn't notice till after I created them that they were Private lists. I can't see where to change them to public lists, is there a way?
Thanks in advance for your help!
Regards,
Vivian
Oops figured it out right after I posted! LOL
Hi,
I created my own map with all the places of interest. The map is public and is useful for several people. I'd like to see statistical access data on it. Is there any way to get statistics? The only thing I see it's the number of views it has got.
Sorry for my bad English.
Hi Mama. Your English is nearly perfect! As far as I know, there's not yet any way to see any stats. If you make a Google My Map, you can see how many total views it has, but that's it.
Hello thanks for putting that together, very handy even when pre-planning. I have one question though once you have the list, and you access it, it displays the items on the left and the map on the right, as you hover over the items in your list, it shows a location marker on the map on the right. Is there a way to have all the location markers display on the map at the same time?
Hello Logan. You don't see the icons for all the items on your list? Odd. Here's a screenshot of one of my lists: https://snipboard.io/z0kv7d.jpg. As you can see, all the icons should be there, with whichever you hover over popping up in red, like you say.
I have scores and scores of deliveries to make. I put all the addresses in a saved list, eyeball the map to see which route generally makes most sense, click the marker that appears to be the best next stop, get directions, remove it from the saved list after the delivery, and repeat until all deliveries are made. But, I can’t find a way to find an address on the saved list, to remove it (or, alternatively, to remove a marker after clicking it), other than just scrolling through the saved list, looking for that address. When the list is long, that is cumbersome. Is it really possible there’s no fast way to remove a marker other than what I’ve been doing?
Hi Michael. You can click the marker on the map you want to remove, then tap the blue-shaded icon that says "saved" on the bottom, like in this screenshot, https://snipboard.io/l2agD9.jpg, then remove it from the list. I hope that answers your question.
Thanks for this post and lists are very useful, no one can dispute that. However, no one including Google is able to explain why the Saved and Starred and Want to Go etc lists don't show up reliably on Android Auto. they want you to use all these lists and they want you to use Android auto and sometimes things show up for me on Android auto and sometimes they don't. Can't figure out how to get them reliably synced up.
Thanks for the heads up on that, Douglas. I suppose the synching issues with Android Auto are similar to those between desktop and mobile. I've added a note on this to the post so other readers are aware.
I have the same problem, and it's incredible that this doesn't work because of some bug. And even more incredible that it hasn't been fixed years later. My saved places seem to sync between my desktop computer and android phone just fine. I can see the places I've saved on my phone. But when in connect my phone to the car's headset with the USB cable, and call up the saved places on the dashboard, most of the lists are empty! A few of my saved places are visible, buy only about 1 in 10! And no, this isn't a "syncing" issue: when you use Android Auto, the touchscreen on your dashboard becomes a second touchscreen attached to your phone. There's only one device running Maps, and that's your phone.
Hi! Is there a way to see public lists, and search for public lists? For example, I am going to Santa Barbara, so I am looking for public google map lists copy for my own. Thanks!
Hi Rachel. Kind of. Go to Santa Barbara on Google Maps on your phone, then tap Explore on the bottom left. Scroll down and you'll find a Featured lists section with select public lists. As far as I know, you can't search those lists, though.
I believe they've disabled this feature as of last year. I've been searching for a workaround or an alternative way to find these amazing public lists. Do you know of any good tips for finding these in 2023?
Hi Chris,
Is there a way for google maps to automatically navigate to next stop on a saved list? I have a list of several places in town I will be driving to one after the other and I always have to get out of saved places and then go back in and click on the next destination and click directions. I feel like there must be an easier way that I haven't figured out!
Hi Donna. Have you tried setting all the stops along your route in advance? (Official instructions from Google here.)
Hi Guys
Great tips… just one thing I can't figure out… I want to print a large map showing all "my places" WITH THEIR NAMES.
Is there a way to do this?
Thanks
Hi Cheyne. You could do it using Google My Maps. Those are more customizable and would be better for printing. We have some tips and links on that in our other post on Google Maps tips.
Sounds like a cool project. All the best with it.
Hi…I have a map named ‘Tokyo Adventure’ with several places I have added. I also have a large group of places under my ‘Want To Go’ list. How do I move them to my custom map? I can’t even seem to manually add them as they already show as ‘saved’….struggling…Thanks
Hi Wendy. On your map, you'd need to tap each location on your "Want to Go" list, then on the location card that opens up tap the icon that says it's saved there to remove it from "Want to Go", then tap the icon again and save it to your Tokyo Adventure list.
Have an amazing Tokyo Adventure. Kim and I had an awesome time there.
Is there a way to only show your Saved Places on the map without all of the other identified locations that Google provides? I find it distracting to see all of the other restaurants on a crowded block when all I want to see is the one saved. thanks.
I feel the same BP. Sadly, I don't believe it's possible.
I don’t know what I’m doing different, but when I open say, Starred places, all I get is a list of Lat/Lons, even though I’ve created a named label for each of them. That’s totally useless to me. I can go to the “Labeled” tab and get a list with the names I’ve given them. It isn’t alphabetized, so I have to scroll through the whole list to find what I want. It’s rather useless in my opinion. I like Google Maps, but I think they have a bunch of idiots working there on this portion of it. If I am traveling to a destination And decide to “add a stop”, it creates a new destination. I can go back in and realign it, but I didn’t say add a destination, I asked to add a stop. Again, idiots. If you know how to get around these issues, please let me know. Thanks, Norman
Hey Norman. I agree Google Maps could be way better. I don't think it's because the people who work on it are idiots, though. I suspect it's just not a priority for the company. Hopefully they'll "wisen up" and soup up the app at some point.
bad design is bad design. although most apps etc can be improved incrementally, designing things in an obviously stupid, dysfunctional way is a different thing entirely, as is leaving out basic critical functionality ie not obscure or nice to have functionality
I have a My Google Map with several hundred saved places on them, but some of the pins just move themselves and no one else has access to my map.
Yikes. I'm not familiar with that issue. So the saved places are in one place one day, then a different location the next? Sorrry, but I 'm not able to replicate the issue so I don't know how to help.
Saved Locations do not appear on the navigation map.
This feature which is available on other navigators allows you to see a saved pin while you are driving near. This gives you a heads up so you can decide a stop.
Thanks, Fred. Hopefully Google eventually adds that functionality.
I have travelled a lot to different countries and tried all kinds of mapping tools.
Saved Places was OK for a while but its poor list sorting and daft incorporation of huge unwanted and map-obscuring photos into place details has largely killed its usefulness when out and about.
I have eventually reverted to using My Maps to create an initial set of locations, which then get exported as kml to the free Maps.Me app for Android. There they can be saved as different layers, colour coded and pushed out to an IOS tablet as well if you want. Maps.Me is also more reliable as all maps are pre-downloaded for offline use.
While Google maps in its My Maps clothing is great for identifying target locations and creating a planning map, it falls down in terms of functionality when out and about – the new incorporation of huge photos in saved place details is a classic example as it obscures a large part of the map you want to use. In the end, I always revert to exporting from My Maps
Maybe I'm just missing something obvious (very possible), but how do you search within your saved list? For example, the list of restaurants I want to try in a certain city is over 200 places, so how do I search just within that list for say, Hawaiian restaurants?
No, William, sadly you're not missing anything. At the very least, if you do a general search for Hawaiian restaurants, it would be helpful if there was some indication of any of the search results being in one of your saved places lists. But not at this point.
Saved places has one HUGE problem: It doesnt show labels if the places have them. Now, in the list, you can add a note to get around this, but when you view map, it shows only lat/lon (at least for dropped pins). This is beyond useless.
They need to show the label in the saved place list and map view when there is one.
Hey Daniel. If I drop a pin and add a label (rather than save the location to a list), I can see the name of the label on the map. Have you tried that? It works for me. Or am I misunderstanding your issue?
hi there.
i am after what should be obvious functionality.
how to move or copy places between lists
how?
kr
Hi Dec. You're right, it's an obvious need. No obvious solution, unfortunately! The only way I know of is to open any location, tap the saved icon, then select /de-select the lists you want it to be on. Notes don't come along for the ride and no way to do it in bulk, as far as I know.
You mention that Google only allows you to save 500 places on a list but I have a list with over 1,600 places on it.
Hi Steven. Good to know. Thanks. I suppose Google Maps must've removed or increased this limitation. I'll remove that point from the post.
Is there any way to search your saved list using a word or hashtag search of your notes? I get recommendations of places that offer the best of something and I add that note…like fried chicken, cookies, steaks etc. it would be great if we were in the mood for steaks and could just pull up only those. There are far too many categories for separate lists, plus you can only put something on ONE list so you have to choose.
It seems so basic. Why wouldn’t a search master like Google offer this?
Hi Anne. The best workaround I can think of is to open up your saved list on Google Maps on desktop, scroll to the bottom of that list so every item on it loads, then do a CTRL+F for whatever you're hungry for. As long as you write that keywords in your notes, you'll find it.
Thanks so much for that!! I asked at the bottom on May 17th, but you got me hooked up here!! Just need to add to my details and then, sadly, scroll and look at highlights!! Thank you, thank you, thank you!! 🙂
Thank you Anne!!!! This is exactly what I was looking for!! I wish it was a little easier than scrolling, but it did work for me. I need more deets! Thank you again!!
Can these lists integrate with google earth?
I don't know. Sorry.
Is it possible to temporarily remove all/any of the saved places from a place – there are times that I find they are cluttering the map and obscuring things I want to see!
Yep. There's a "Hide on your map" option if you go your list of saved places and click the three little dots beside the list you want to hide.
Is there a way to find save locations using your voice? If I've saved my friend's house as ”John's house”, saying navigate to John's house, does not work.
Not that I know of, Karen. That'd certainly be a handy function. You might be able to do it with Siri or Google Voice if you add John's address to his contact?
Nice post!
So millions of people have shared their maps using “public”
How do I find these?
Like “ Baja bcs campgrounds”?
Thanks
Hi Andrew, sometimes Google suggests popular lists in the explore tab of the mobile app, but as far as I know, you can't search for specific ones. If I'm wrong, or if they release this functionality, I'd be just as interested as you.
Once you save a location and give it a name, a label and or a star. Can you bring up directions to that place with voice button using the name given? I save my son's address named his name and house. When I tried to hit the voice button and asked directions to named house I get anything but that. ???? I was told I needed a new phone as mine is older and the car is new but can't get newer phones to work either. Is it not possible to get directions by the named/saved location vs street address? Do I need a specific phone??? Is the car messed up? I think it's such a simple thing that I have to be doing something wrong. (I know its not simple programing and such but voice is on all gadgets and the point of saving a location is to go there easily hands free on all cars)
Hi Scott. If you add your son's address to his contact card on your phone then give Google Maps access to your contacts, you can get this to work.
Hi I am doing exactly the same thing . I however need to print out the list of places I saved another a particular label say places to eat in Toronto . I would want to print these and then strike them off while pinned on a board etc . Is that doable
Sounds like a cool project, Abishek. I'm sure there's a way to export your list, but not an easy one—certainly not easy enough for me to look up, and explain here. If you search "exporting google saved places" you should find a better guide than I can provide.
I often save places to Google maps. The problem is I forget about them. Or even remember to check for them later! Does Google maps have an option to automatically notify me when I may be near one of my saved places?
Interesting idea, Kimberly. It doesn't exist, as far as I know. Apple reminders has a functionality like this you might want to consider if you use iOS.
Well, I came here to see if you could tell me of a way to search through some of "lists-Notes".. I didn't see it.. We sell a high end product and like to see and show others pictures after installs or to help them with a color choice. We try to get photos or videos, but we don't always and some of them may be years in the future and the clients just forget from relief I suppose. haha I would like to be able to search through my notes and find specific things. Know of a way to do that? I would really appreciate it. Thanks for any help and good travels!! Would love to find someone to explore with (besides my elderly aunt who can only manage about 2 hours of non-strenuous adventures.. unless food is involved! 😉 ..)
I'm hooked up now Chris, thanks for the help via another post!!
Been using Place lists for years. Doing some reorg now that it's getting pretty long, and I'm trying to move multiple places to new lists. Especially from the default Starred list which I have a tendency to dump everything into at first.
Do you know of a quick way to move places from the Starred list to a new list? I can do this one at a time by going to the map and actually relinking the pins, but is there an easier way?
Thanks!
I don't know of any way to make multiple changes at once. The fastest approach I've found is, instead of finding and clicking on the icons on the map itself, pulling up the Starred places list and clicking to un-star and re-list them one-by-one there.
Help! OK, so I can't figure out how to move ANYTHING from the starred list to another list. Before I can ask for the "fastest" way, I need ANY way! I'm trying on a macbook. Perhaps I should try on my iphone.
And on that note, when I'm adding to a list from the desktop there seems to be no way to choose a list and they all go to starred??
On your Macbook, click any location you have starred, on the info card on the left beside Directions will be the star that says Saved. Tap that and that'll open all your lists. Tap any list to add the location to that list as well. Or tap Starred Places to remove it.
I recently got a new iPhone, went from the 6 to 12 mini. Love it, especially the battery and camera. I noticed that my "Your Lists" on Google Maps are no longer there. Oh no! Are they retrievable? I had never had this happen when I have upgraded to new iPhones. I had over 300 places saved, want to go, favorites, and many were family addresses. Is this an Apple call or a Google call?
Please help, concerned Google Map "Your lists" user.
Hi Lisa. Are you logged into the same Google Account on Google Maps? And are you clicking the "Saved" icon on the bottom of the app and scrolling down ? (That's where you should find "Your lists")
Looking to see if there is a way to get Google Maps to notify you if you're close to a saved location. Wandering around Manhattan, it would be great if I was notified (reminded) I was close to that great pizza place I had added to my saved list. Is this possible?
It's not a notification, but the closest thing I know of is to open your app, click the Saved icon, and there you'll see "Nearby saved" items.
Wouldn't it be great if you got an alert when you were close to one of your saved pins
I create lists of saved places, and then some of them don't show on the map. if i search for the place, Maps says it is saved in "XXX" list, but while some places show others don't.
Does everything need to be saved in one of the default lists? I've got 68 places in an Iceland Map, and maybe half of them show. It doesn't matter whether is on the iPad, iPhone, Mac Safari, Mac Chrome. They aren't the first entered, the last entered, or any other pattern I can find. Zooming in on an area won't make them show either.
This makes it worthless as a planning tool. You want to look at what you have tagged for an area and a third of them don't show. You could figure out days later that you missed an important location.
Frankly I find the lack of customization (all tags are identical) and the random missing places infuriating. It actually used to work better.
I guess I'm using a paper map and a Sharpie! Otherwise I could re-enter all of them as a Starred and see if that works differently. Doesn't Google have anyone testing this stuff?
I tried exporting my saved data. That does not include any of the custom lists.
There is also no way to copy or move items to a different list.
I guess the only sure way is to use the default lists (maybe).
Can you give me some ideas for office wall maps? So, I'm not looking for anything digital or online. We have a huge world, state wall map and 30 employees. I thought it would be good idea to "drop a pin" for places they've traveled, vacationed, or resided. More or less for conversation piece, b/c we're always standing in front of the map. I wanted to send an email to all asking them if they're interested in sharing their favorite spots to visit. And each person would have their own designated color push pen. Hopefully, you get the general idea. If you do, can you help me on wording the email? Thanks, Annette K.
Cool project, Annette. No, I can't help you write an email. Interesting question though. All the best.
Thank you for this! I didn't realize you could hide lists and I hated all the markers looking the same and clogging up my map!
Glad to have helped you declutter your maps, Stacy. All the best.
Can't search within "want to go" or any other list? big omission from google to keave search out of something. on your screencap i can see over 400 places on some lists, mine look similar. might be nice to search among my saved restaurants for Chinese food or bakeries or coffeehouses etc
Yeah, a simple search function would be nice. For now, the best you can do (as far as I know) is open your list on desktop, scroll through it so it loads fully, then do a CTRL/CMD+F.
How do I organize the favorites list. It’s not alphabetical, it’s not chronological. I have over 300 businesses I visit . The only way to find one is to sort endlessly through the list or type the name in search hoping I spell it correctly.
Good question. I'm looking for the that answer too.
Hi Bradley,
Yet another feature that is incomplete and mobile-only, you can Edit a list with the triple-dot menu and flick the switch "Customer list order" at the top. It's a manual drag (both physically and metaphorically) operation but it can get the job done for smaller lists. For a list of 300, you *really* have to be motivated for the value. You're apt to spend more time sorting than you reap from later scrolling to find.
Sorry, typo: "Customer" -> "Customize"
I want to make a map of locations where I spotted certain birds and wildlife, but obviously these locations are not usually labeled in google maps. is it possible to add locations to a list with only the coordinates?
Yeah, just plop the coordinates into the search bar of Google maps. That'll drop a pin there. Then tap Save.
This is a great post, thank you. I am perpetually disappointed with Google's Maps customization offerings. I bounce back and forth between MyMaps and Lists because neither fits my needs. I won't re-hash the ones already mentioned (customize the balloons, please!), but here's a major gripe I have with Lists – lack of media. Say I read an article that really makes me want to visit a place. I'd like to save that article with the pin so I can be re-inspired next time I'm in the area. Saving the link to the notes remains as plain text. Annoying.
I'm also a sucker for printed guidebooks. With MyMaps I can snap a photo of an entry that really inspires me and save it with the pin. But, not being able to do this on mobile is a deal breaker. I am considering making a Google Drive folder with these kinds of snaps and leaving a link to it in the Notes section. But, just like shelling pistachios, this is a *lot* of work. Do you have any better ideas?
I'd love to see one of your MyMaps with photos and links to related articles, Ashley. Please share one, if you don't mind. Maybe, though unlikely, seeing it would help me think of some easier workaround to what you're doing. Otherwise, sorry, I don't know.
What's the difference between My Lists and My Maps?
Lists are on Google Maps itself. My Maps are custom maps you make on a separate interface.
When I click the bookmark icon for “Saved places,” the app gives me three categories: “Recently saved,” “Nearby saved,” & “Your lists.” Is there a way to make “Favorites” the 1st item in “Your lists”? The top 4 lists aren’t the ones I use frequently, so I always have to click “more” just to get to the list (“Favorites” that should logically appear at the top. Thanks.
It looks like the the lists displayed under "Your lists" are in order of where you added items to last. So the only way to keep "Favorites" in your top 4 would be to regularly add or remove items from it. Not helpful, I know.
Thanks for the reply. I didn’t realize how they were organized, so this is at least a work-around. Much appreciated
In Android Auto Maps my saved "Favorites" aren't sorted according to nearest distance which is extremely annoying (I think they are displayed based on last entered at the top). When on Maps in my phone and I go to my "Favorites" list they automatically sort by nearest distance which is obviously the way it should be. Is this a known issue Google is working on?
Nice article, any chance you know how to change your private "Starred Places" to public or how to share that list?
Thanks!
Jeremy
Not currently possible. Thus the recommendation from Chris to avoid the starred list except for immediate/short term needs. I use if for the same.
I have been using these for a while now as we are living in Ecuador and are still finding gems around the city. I have lots of places on my Want To Go list, but i frequently forget to check it when we are out and about. Is there a way to set notifications for when i get near a saved place on my Want To Go list?
Interesting idea, Melanie. As far as I know, it's not possible
Thank you for your info on Google Maps.
I have been a user for a number of years and find it ever so useful. However I have an issue which I have not been able to properly sort out.
Recently while I was in San Sebastian my wife and I were doing all sorts of walking and exploring around the city. I had pre-loaded a large amount of info on Restaurants and things to do. So we would walk to 'Place xxxxx' using our Mobile phone. But I found it incredibly difficult to walk such, that the direction I was to travel in was toward the top of the screen. I find myself swivelling the phone to orient things correctly – sometimes it works fine but not always.
Is there a setting like when you are navigating in a car where the direction of travel is always to the top of the screen?
Any assistance much appreciated..
Hi Mark. If you set a destination and start navigating, tap the bottom where it says how long it'll take you to pull up more options, tap settings then toggle off "Keep map north up," I think it'll do what you're looking for.
Great – Sorted.. It was so frustrating trying to walk anywhere… Thanks – xx
This is great and I've been using it for years but I want to be able to edit my icon lists as I have 6 personal lists and they all look the same on Google Maps.
Do you know if this feature will be enabled any time soon?
I'm with you, Stephen. And just like you I have zero idea if ever it'll be possible.
So on a list there’s a way to mark a place as “visited”. What I’m having trouble with is that I can’t see which place I’ve marked visited unless I click on the 3 dots and remove it. Is there a way that shows it on more easily that maybe I’m missing? It’s just hard when you have a list of 30+ places and you haven’t been to that city in a few months to remember which ones you’ve visited out of the list and I dont want to go through each one.
As far as I know, Bobby, there's no hidden "hide visited places" feature. I try to be diligent in making a note on places I may want to return to and removing others. But yeah, it's a hassle.
Hiding lists on my map is temporary, how do I make it permanent? I'm using Maps on Android. I go to my lists and I select "Hide on your map". The list does indeed hide on my map. But a few days later the lists are all being shown on my map again. How do I hide the lists permanently? I don't want to delete the list, I just don't want to look at it everyday. This has been a problem for at least a year.
That's odd. Maybe try going on desktop and hiding your list, there? Or, if you mostly use desktop, hiding on mobile? It seems sometimes Google Maps has some sort of sync issues, so maybe that'll do the trick.
I have the exact same problem. It's terribly annoying. Has anyone found a solution yet?
I'm sorry but Marrakesh sucks! I'm here now, and I'm THOROUGHLY unimpressed! I've been traveling the country a few weeks now, and it's the WORST!
Hey Anthony. Not sure why you didn't comment this on our Marrakesh post, but in any case I'm sorry your experience was way worse than ours. It does seem that some people get haggled and hassled a lot more than we did, for whatever reason.
This was a great help! I have created my list (tick) and shared them on a public group forum for others to see (tick). Most people can see it, but a few get an error along the lines that the list has been deleted? Any ideas why that happens?
Also when I test the link I send to people all I can see is a few of the 300 odd locations I have added to my list. It opens in a browser on Google.com. Can I send a link that opens on their client in their Google Maps app?
Hey Simon. Strange. Try this link to one of my lists: https://goo.gl/maps/9xpfBAoDq8Ln1AMG9. Does that open in a browser or an app? For me, it works fine. One possible reason I can think of: Are you sharing the link from the browser? Or are you clicking the share icon/button on Google Maps to generate a special link sort of like the one I gave you here?
OK, so me and my friends climb alot and we are trying to save where we climb. To do this, we have used google maps to save a list of locations of where we have climbed.
The problem with this is that when i go into the list of saved places, All i see under the names are a bunch of "dropped pin", followed by the coordinates.
1. Is there any way to make the lists more descriptive? Can i rename the dropped pin names to a custom name? I know i can label the pins, but the problem is that labels are not organized by list, so you'll just see a bunch of labels at once. To get some organization, i have to use lists but like i stated above. But not being able to add a custom name for each pin in the list is annoying, seeing a bunch of "dropped pins" in the list don't help me. I know you can add comments, but is there still anyway to change the name of the dropped pins themselves to make it easier for me?
2. Is there any way to add a photo to each pin i dropped and saved in my list? This is important because the locations in the jungle change, the landscape change, sometimes trees are chopped down, sometimes they're there. there are Several graves of other people nearby and it's hard to distinguish between then, so being able to add a photo to each dropping pin i saved in my list would help. Any way to do this?
Hi Karsten. I wish I could help with better suggestions/answers, but the best I can suggest is to look into Google My Maps. Those are more of a pain to make and don't work as well offline, but they're way more customizable.
Or maybe try another app than Google Maps entirely. Some readers here have suggested alternatives in the comments.
Hi Karsten,
Google Maps doesn't directly solve your use cases (or you'd have figured it out already).
1) Similar to your use case for climbing, I have a list for kayaking launch points. The only method I've found to rename the pin to something more descriptive is, as you have, add a label. In addition to the organization problem you cite, it also has a down-side of cluttering your map. I usually hide my kayak list to reduce the noise but the labels remain (and can't be hidden!). In the end, I removed the labels and just put the text in the text description tied to the pin. It doesn't show up on the UI but at least I can find the info without having to abide with all the clutter. Not at all ideal.
2) Perhaps Google Photos can help with your photo case. I really like the Google Photos map view (mobile only) as it shows "hot spots" with the locations of any geo-tagged photos you store on their service. It's been great for me to find places I enjoyed previously (without enabling the scary Google location tracking service).
Chris, to your challenge with "want to go" vs "visited" lists, I feel your pain. My preferred work-around is to keep a single list, like "Toronto restaurants", and also tag the "want to go" locations with the global "Want to go" green flag. In my tests, the green flag takes precedence over the blue pin so that all the locations in that list visibly stand out. Once I've bene there and assuming I like it enough to keep it, I simply remove it from the Want to go list, leaving it in the "location/category" list, at which point it shows as the blue pin. The down-side is similar to above – if I choose to hide "Toronto restaurants", then the "Want to go" locations are still visible (unless I hide all of them), but this is an acceptable limitation for me in this case.
BTW, the Google Photos map view is confusingly hidden on the Search "tab". I usually forget and fumble around to find it again.
I created a quick list of places in Seattle. Now, I go to save lists, and I can select my Seattle list, and see a map with pins. But the pins aren’t labeled, and I can’t select them to see what they are. I tap a pin, and a new red marker appears with a gps coordinate. If I zoom in closer, I can’t even get the red on any more. Nothing is selectable. Is that just how Google maps works?
Def not like pistachios aren’t shelled at the free gourmet lunch – more like boss who is constantly in your face, brags about pistachios at his luncheon – then thinks its fine that they are in the stored supply room and you have to ask around to get the key. I have tried for years… years to use Google maps effectively. I don't know how they find so many engineers that never use Google Maps and instantly see its failings. Not only can you not distinguish your wildly different lists of saved places but Google puts its places on map too – so its simply a jumbo of markers with some that matter. You have to click on every one to know to see if its that one hike from 9 years ago – or the place for the killer concert this coming Sat – or the store Google wants to highlight. That's absurd. Just because its better then paper maps of 20 yrs ago doesn't absolve them of this one of many absurdities in the interface. Use it and see how it works! …geeeze. Can't add your places when planning a route…What? Probably the most logical surmised use right? Presumably you'd want to return to a 'saved place' no…? And fact that the desktop app is worse then mobile — when map on monitor is about 12 times larger then phone screen? I can't even think of an absurd analogy for that failing.
When you allow yourself to drop the google-colored glasses and think of things from your own sober utilitarian point of view, it is utterly astonishing how difficult and ineffective Maps and other products are to use. And fact that if you don't use it for a week or two you may have to Google again how to navigate to your places or read a short essay on difference between your maps and your places lists -is telling enough. And then make sure its for current app version as navigation steps look different , get re-written every major "upgrade". I bet everyone here has a weird assortment of locations marked in different ways in half-hearted started place lists and theme maps in the Google netherworld – to little sustained logical use. Hey Google, the most logical thing you ever did was make a one box search engine – and I hardly trust that anymore. Google Docs, Google Drive, Google Maps, Google Photos, are clever, hyped – clunkers. You don't fix 'em – you just put more energy into wowing everyone to point where its blasphemous to turn off anything Google.
The lists on Google maps are completely useless. I’m under the list I can view the name and note, but it doesn’t take me to the location. I have to randomly click my saved spots in the map to furs where the location is.
Strange. When you tap the name on your list and it opens that location's card, if you swipe that card down, does it not show that location on the map?
Hey Chris – love this post and love your sense of humor! Will be following your blog!
My BF and I have embraced travel life – we're still relatively new (since Dec '21) and are still working out all the kinks. Google Maps and sharing info between our phones being one of them.
We'll be in Venice next week and have a bunch of places saved in our "Venice" list. We'll only be there one day and figured we could use Maps to optimize our time. Saved list is no problem, but every time we try to use the "Edit List / Customize List Order" feature, it allows us to reorder and save items in the order we plan to do them, but then the next time we open the app all the places are jumbled again. SO FRUSTRATING!
Have you ever had any experience with this or know others who have? If so, have you discovered any workarounds?
Thanks so much for your help! We'll be following!
Best, Sarah
Hey Sarah, I didn't know "Customize List Order" was a feature, so looked it up, and found it's only on Android. Since I only have iOS, I can't fiddle around to try to help. Maybe you're sometimes forgetting to tap "Save" after re-ordering?
I have been using saved lists on my travels for ages. The thing I get frustrated with is you can't plan routes using your saved places. eg War Memorial to Art Gallery ? All I can do is 'Directions to Art Gallery using Your Location', provided I'm at the War Memorial. Planning and saving routes from saved places is a pain in the *****. After all these years you would think they would have solved this simple omission. Unless… you have any tips?
Thanks for the tips. I really need to tidy up my Maps. It's all Starred places and Want to Go's. Talking of which, is there a notification for when you're near a saved location? I work in London and I've often saved places and forgotten about them, but I've probably been near many of the places I've saved and had no idea.
Cheers, Chris.
I want to make a saved list of residential addresses from my contacts. Contacts will show up on my Google maps, But when I want to add a contact to a saved list, it always gives me the error message, "can't add this place" . Do you have any suggestions? Thank you
Good question. And good idea. Use labels for each of your friends' homes, then create a list with all of those labels.
I love saved places in google maps and always use it on my iPhone. The lists seem to be accessible from my desktop Mac or anywhere else I open google maps, but I recently noticed that my lists aren’t there when I open maps on the iPad. I do have my gmail on the iPad, but through the gmail app. Can you help me figure out how to sync these?
Sorry, I don’t use the google mail app, my gmail account is set up with email, calendar, contacts and nots but there’s no toggle for maps under the account settings.
Hi Mollie. Are you sure you're logged into the same Google account on your iPad? Otherwise, maybe log out and in again and see if the locations sync?
Hi there. I love this article. It explains more than I've learned on YouTube and google help forums. There is a question I cannot find the answer to. I hope you can help. I have 200 places saved in one city that I'd like to visit when I go. Of course I won't visit 200 places in one trip, but over time of going back there I'd sure like to see them all. Desktop – On the left of the map, Google lists these saved locations on a list I can scroll through to click on one, and it will show up on the map on the right. Phone- same list shows up and I can scroll through the same way. Since I have 200 places saved, I dont want to scroll through 200 places to find number 199. I want to search for it and go right to it, so I can see where it is on the map. Say I want to search for Burger King in Los Angeles (I've saved it), but there are 200 other saved places and I only want to find Burger King. HOW DO I SEARCH FOR IT from my saved description list????? I cannot find this answer ANYWHERE!! I can't even email Google unless I'm on their Google One plan. I have found nothing on their help sites, their FAQs, Youtube, other searches, asking a travel group how they do it, (assuming they use Google Maps). I got NOTHING!! Thank you so much if you can help.
Hi Melanie. The only way I know of is on desktop to scroll to the bottom of your list on the left, so all the locations load, then use CTRL+F.
I have various lists, like restaurants in a particular city. One list has about 55 entries but I do not seem to be able to search a list, like "beer garden", or "Chinese restaurant", etc. Is there a way to search a list (also search on custom notes that can be attached to items in a list of saved places)?
Only if you do it on desktop and use CTRL+F, but even then you have to scroll to the bottom of the list so every location loads and is find-able.
Problem: I have several dozen lists now with thousands of saved locations. If I want to view only pins for one of my lists, how do I filter out pins from all of the other lists without having to hide those lists? (referring here to Google Maps on iPhone)
Solution: click the Saved icon at the bottom to view all lists, then select the list that you want to view. Click one of the saved entries on that list. Swipe from the top of the screen down. The map appears with all pins in red, but only show the pins for locations on the selected list.
Use Case: I am planning a trip to central PA, and I want to map a loop that hits places that I have placed on several different lists (hikes, museums, restaurants). I added these locations to a new lisl (also keeping them on their original lists) that contains only the locations for this trip. I then used the method above to view the trip-specific locations so that I could plan an efficient route. Still manually planning the route because Google does not allow pin-to-pin automatic routing, but so it goes.
I don't understand why it's not basic functionality to be able to set one of your places as a default option for directions. This way, anytime I click on Directions for a location I have the option to either get directions from my location or from a saved place I've set as my default, like Home for instance. For those of us who use an ISP that shows our location in a different part of the country, this would be very useful.
I use FIREFOX browser. Google Maps. I can no longer add pin drops to my saved lists. Is there a add on for this problem .
Hello there, thanks for this. Very helpful.
I am having an issue whereby on PC all my "Want to go" saved places display but when I am on mobile only the starred ones synced. Tried to logout/in, tried to reinstall the app but tonight. Any ideas?
See my comment below. You should be able to find and manage all places on your Google Maps lists from the collections view.
I found a workaround for sharing a list (when it doesn't share as expected).
You can now view all maps saved lists in your Google Collections. The current URL to access the collections landing page is https://www.google.com/save . You can also get there from the Google app switcher menu in the top right corner of Chrome. The "Collections" icon is usually in the second set of applications shown, so you must scroll down a little.
Once on the Collections page, you should see your saved lists from maps and any other collections (previously, this feature was used to save images and products from Google Shopping). You will see that you can share if you click on your list. After many unsuccessful attempts to share my list from Google Maps, when I shared it from the collection view, it worked.
A bonus is that the collection view is a more visually appealing way to view your saved list.
Great tip, Brandon. Thanks! This post is due for an update, and I'll be sure to mention this when I do.
I had hundreds of saved places on my previous iPhone. I recently changed devices and I cannot see the saved places anymore. I’m connected with the same gmail address to google maps but it seems like I have lost all of the saved places, any idea how to recover ? Thank you
If you check the link Brandon shared in the comment above, do you see your locations?
So, were your places saved on Google Maps or some other method specific to iPhone/Apple? (Excuse my ignorance of Apple products, I have never used them.) If you saved them as places in Google Maps, meaning to a list (Google Maps > Your Places > Lists), it doesn't matter what device you saved them on; they will be accessible anywhere you log in to maps with your Google account.
PSA: Understanding the difference between your iPhone/Apple account and Google is important. I see a similar issue often when it comes to contacts. Shockingly, people today still save their contacts to their phone instead of, say, Google Contacts. When the phone is lost or broken, you usually cannot recover that information if it was saved to the device only. In the case of Contacts and Maps, if you ensure you are saving them to your Google account, you will have that data no matter what device or browser you log in from.
Another PSA for your readers: Google My Maps was a popular method of saving places to a custom map before lists. It's still popular despite missing many useful features. I've heard rumors that Google My Maps will be EOL (End of Life) sooner than later, which means it will no longer be actively developed and will eventually stop functioning. If you still use Google My Maps, I highly recommend migrating to lists. Although lists can be buggy sometimes, it seems Google intends to keep the feature for many years. Hopefully, this means they will fix the known issues and add much-needed features to realize the full potential of lists.
Hi Chris. Great post, and informative discussion. Question: when I turn off my (yellow) starred places, it leave behind a blue label flag. The only way I have seen to turn off my blue label flags is to change to Satellite Map type, and uncheck Labels, which turns off everything but the imagery (including highways, roads, highway shields, road and place name labels, POIs and their labels, etc.). With the Default Map type, turning off Labels is grayed out. Do you know if there is any other way to turn my blue label flags off?
Hi Ron. A quick Google search indicates to me there's no way. One other alternative is to look at your map in incognito mode, which is easily done in two taps (profile image -> Turn on incognito mode).
About "Can I export/import lists of saved places", yes, you can! Not import, but at least, you can export 🙂 You need to use Google Takeout first, and you'll get CSV files with… Google Maps Links! Kind of useless, thank you Google! Luckily, there is this tool called Export GM (https://exportgooglemaps.com/). It transforms those files in exactly what you expect, with the GPS coordinates, names, etc, etc.
Updated! Thanks, Jordy!
Hey Jordy, any info or feedback on how long it takes (exportgooglemaps) to process? Im sure this depends on file size but on the page that offers me "Pause" or Abort, my progress bar continues to show at 0% so it seems like this isnt starting.
Thank you
Thanks for the in depth hints. I had a list that was not showing in the 'explore' section because another list had been saved into the 'places' tab and was being used as a default overlay. You are totally right- it would be great to allow more than one list to show at a time with different colored icons. Sometimes you have to wonder if the programmers even use their own programs.
"Lists" is the biggest piece of trash that Google ever invented, seeing as there is absolutely zero compatibility between Lists and Saved Places. It makes no sense to anyone why this is a still a problem. Even several years later, Google has nothing to say about it. Go and ask questions in the Google Help communities, and you get nothing but a bunch of "platinum product experts" telling you that they have no idea what to do and that you should forward it as a "feature request" to Google. Don't even waste your time with "Lists".
I have a problem with GM lists. Icons are visible cluttering the map, for most/all the lists when I open Maps despite having them turned off the day before. Is there a way to set the default to off in settings?
Sorry, I wanted to say Saved Places not Lists above
Is there a limit to the number of favorites a user can have on their Google account?
based on comments above, it's 500
Very unique situation, but if you need to transfer your saved lists to another gmail account, doing so from the "collections" page http://www.google.com/save/, this gives you an option to share a collaborator link (which you can't do from google maps). Sharing a collaborator link will allow the list to show up in the default view of google maps on the new account.
Hey there,
I came across this post and thought I'd ask…..any way you know of to create sublists? Like, "ITALY" main, then "Venice" then "restaurants"?
Hey. Sorry. I don't believe that's possible. Wish it was, though.
What good are these lists when every saved location disappears from Maps in Android once you start to navigate a trip? The answer is "they are only useful when pre-planning a trip, and don't provide any flexibility during your trip, when en-route to your destination".
When I try to export my saved places to create a back up, it says my data is empty. I have location history turned off. Help please, I want a back up of all the lists I've created of many many places
I've made some lists of saved places for a few cities before reading this and now would like to reorganize them to split my lists into restaurants vs. sightseeing, but I can't find how to move or copy places between lists.. Do you know if that's possible and how to do that?
Hi!
Do you know if there is a limit to the number of lists you can have? I have 24 not including the ones they put on the account. They are not allowing me to create more.
Hi, great read! I have been enjoying using google maps pins for years, but recently a strange thing happened and I am hoping you can help me find a solution. All of my saved lists moved to "my collection"on mobile and I cant see pins on the map anymore. It is sooo annoying I have no idea how to fix it, Is this just a new unfortunate update of the software? Do you know anything about it?
This has happened to me as well, without any prior notice/warning. It's incredibly annoying, to have spent a lot of time saving places only for this arbitrary action to have been taken; it essentially makes Google Maps only useful for a weekend or week's travel, nothing more. If anyone has a workaround/solution that's practical for thousands of already-saved places, please post.
1. Is there any way to reorder the lists of saved places themselves? If so, how can we reorder the lists? For example I wanna place the list of "restaurants" before the list of "parks"
2. Also, how can we reorder the individual saved places inside each list? Is that possible? Whether we can manually change the order of each restaurant or sort it alphabetically?
Thanks for the comprehensive article 🙂
Hi there, thanks a lot for the tips! Not a life or death type of situation, but is there a way of choosing which “label” shows “on top”? I have a lot of places saved in Google maps, so before zooming in a particular city it’s a lot of labels on top of it each other. At Google maps they seem to assume I really want to find the one thousand and one “want to go” places first, occasionally overlapping with my own lists which are also very numerous. But the fact is that whatever I’ve marked as a favorite is indeed somewhere I like, and probably where I go most often (also, these places are way fewer and further in between compared to the other categories). I’d much prefer having these show “on top”, as they’re what I most often search directions for etc. This is obviously solvable with a bit of patience and zooming in searching in Google maps separately each time, but perhaps you know a shortcut? Thanks!
Oh my gosh, you're my hero. I never knew about the "Collections" or "Saved Interests" feature for saved maps before and the beyond essential features it allows. All my Maps days, I've been thinking my saved map locations were stuck with the name Google had for the place. Everything was "Dropped Pin" what a mess. But now! Now I have a way to rename saved places to something meaningful! I can reorder places on my computer (which I find so much faster/easier than tap and drag on my phone)! This is great. Thank you. Thank you. Thank you.
Thanks for this! I have used google maps lists for years which means i have a lot of them. However, when I go to find a certain list, they're in some random order. Why aren't they in the order of the ones I created or added to most recently? I have to scroll through my kids' baseball teammates' houses and trips I took 10 years ago to get to the list I made yesterday for the town I'm currently in.
I can't figure out how to change this, any advice? I'm using an iphone 12 btw.
thanks! -Jill
Hi Jill. Odd. I have an iPhone, too, and my lists are ordered by how recently I added/removed to them. Maybe your app needs an update?
Thanks for the suggestion!
I first read this article years ago and occasionally return to it as a refresher, as I swear by it. I am a diligent location saver and this article is the only thing I've ever found to be a comprehensive procedure for optimizing Google Maps saved places. Great work, Chris.
Might I suggest updating the article now that Google has added custom icon features? I have added emojis for different lists (e.g. burger for restaurants, pins for POI, Switzerland flag for a shared trip, etc). As you pointed out in the article, those of us who swear by the Google Maps saved lists have been clamoring for these for years. In addition, it might be worth pointing out the other update: the mini icons when you zoom out.
As for a wish list, I second your point about wanting links. When I see something I like, I add it to a respective list with a note of why, with an added step of tallying how many times I have wanted to save this (X2, X3, X8) so I know when something is a must-do. I also will add a link to the Instagram reel or article that was referenced. This part is clunky, as it requires copy-paste into a browser to re-access, but it is the only way I would remember the source. I will sometimes try to copy the body of the text if there's a blurb or paragraph, which makes it easy to reference. I do notice some weird functionality if you try to add or access notes on the desktop of saved locations that are polygons (such as a city). Probably a bug but it is a headache when trying to be consistent.
Finally, as you pointed out, it would be a game changer if they created another field for "Visited" vs "Want to Go" and allowed toggling as it would clean up lists a ton. One of the most powerful uses I have for Google Maps is quickly checking where I've been. I use this to remember trips, sharie a recommendation, or just orient myself to some yet-to-be-explored POI. My workaround for this is by "painting the map red" using the favorites list, but that runs into scale issues. The technology to do something like this exists, as they employ it in the "Timeline" app. If they were to ever marry the two of those apps together, you could have a life-changing Geo-journaling / Geo-planning app. However, it doesn't seem like Google is too interested in this.
Thanks Grant for the thoughtful comment and the heads-up on the list icons. I hadn't noticed that! Guess I'm not as active w lists now that I have a 3 and 1 year old. Looks like the icons appear on mobile but not desktop? Here's hoping Google adds the toggle feature next.
your site very helpful!!!
but as you also mentioned, google maps have not addressed the most simple issue. when you make a list on whatever system or platform you must be able to easily sort it by many ways. in google maps the most helpful way would be by notes. e.g. if you have added 50 places in a list you can sort it only by moving one by one entry. it takes ages. so frustrating….
I've been using Maps and lists for a long time and my brain simply cannot comprehend why, after thousands of complaints, Google can't fix the most simple of features: sorting.
The ability to identify lists in a map by custom icons is amazing! So why can't I do it on desktop?
Lists are kinda useless without notes, but it's even more frustrating on desktop when the entire thing is buggy and says it's saved a note but it didn't, or says it can't save a note at all, it saves it but saves it to a different location than the one you're actively editing.
I work outdoors in very remote areas. Having unreliable or incorrect info is a costly mistake, both in gas and time. While Maps has been my best tool in the field, it's not *good enough* and has me searching for an alternative. All I've found is how to export, convert, and import into something like Earth, but I'm gonna keep looking.
For people who are unfamiliar, this article is a great resource!
I've been using saved lists in Google Maps for years but never thought about color-coding them by trip—such a simple trick that changes everything. The collaborative lists feature is a game-changer for group travel too.
On a related note, I've started collecting visual inspiration for destinations using higgsfield.pro, an AI image prompt gallery. It's helped me create mood boards that actually match the vibe I'm going for, rather than scrolling through generic stock photos. Curious if anyone else plans their trips visually before booking anything?
Great tips on organizing saved places! I've been using lists for trip planning, but never thought about color-coding by priority.
On a related note, I've been experimenting with visual inspiration for my travel lists—turning saved locations into custom images to share with trip buddies. Found a neat tool for that at higgsfield.pro if anyone's into creating visuals from their itineraries.
Do you export your lists to other apps, or keep everything within Google Maps?
I've been using saved places in Google Maps for years but never thought about organizing them this way—your folder system for different trip types is brilliant. It reminds me of how I curate visual inspiration for my own projects. Lately I've been collecting AI-generated images with specific aesthetic vibes over at higgsfield.pro, which helps me build mood boards for destinations before I even book flights. Do you ever use visuals to plan out the *feel* of a trip, or stick strictly to logistics?
Yes you are really right i agree you can try our services